Une doctorante et un doctorant reçoivent le prix de thèse 2022 du GDR robotique
Lors des journées nationales de la recherche en robotique, le Groupement de recherche (GDR) Robotique a délivré ses prix de thèse qui ont pour but de distinguer de jeunes chercheuses et chercheurs en robotique. Le premier prix a été décerné à Maxence Leveziel, qui a effectué sa thèse à l'Institut Franche-Comté Électronique Mécanique Thermique et Optique - Sciences et Technologies (FEMTO-ST - CNRS/COMUE UBFC) et le second prix à Isabelle Maroger, qui a effectué sa thèse au Laboratoire d’Analyse et d’Architecture des Systèmes (LAAS-CNRS).
Lors des Journées nationales de la recherche en robotique qui ont eu lieu du 15 au 20 octobre 2023, le GDR robotique a délivré ses prix de thèse. Ceux-ci distinguent de jeunes chercheuses et chercheurs en robotique dont les travaux, d’une grande qualité scientifique, ont permis une avancée de la recherche par des contributions au progrès des connaissances scientifiques et/ou aux innovations techniques en robotique.
Pour cette édition 2023 qui concerne des thèses soutenues durant l'année 2022, un doctorant et une doctorante ont été récompensés.
1er prix de thèse du GDR Robotique
Le 1er prix a été décerné à Maxence Leveziel pour sa thèse intitulée : Conception, modélisation et commande de robots parallèles à articulations souples pour la micromanipulation à haute cadence.
Cette thèse a été réalisée à FEMTO-ST.
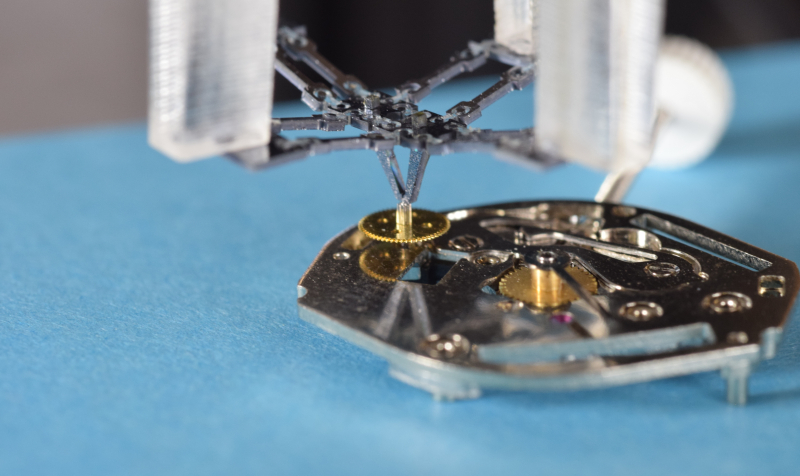
La miniaturisation des composants des objets manufacturés est de plus en plus importante. Afin de réduire les coûts de production, il est nécessaire de développer des solutions robotiques de micromanipulation et de micro-assemblage permettant de manipuler des objets avec des tailles comprises entre 10 μm et 100 μm. Les solutions actuelles ne permettent pas d’effectuer des manipulations à haute cadence, ce qui peut être un frein en vue d’une utilisation industrielle. L’objectif de la thèse de Maxence Leveziel est donc de proposer une solution de micromanipulation permettant d’atteindre des hautes cadences avec une capacité de préhension.
Pour ce faire, une solution robotique, MiGriBot, a été développée sur la base d’une architecture parallèle possédant des capacités de préhension et actionnée directement depuis la base, limitant ainsi les masses en mouvements afin d’atteindre de hautes cadences. Afin de miniaturiser le manipulateur, les liaisons mécaniques conventionnelles ont été remplacées par des articulations souples qui permettent de transmettre des mouvements via leur déformation. Grâce à ces innovations, MiGriBot est capable de manipuler des objets de tailles comprises entre 40 μm et 350 μm et de le faire plus de douze fois par seconde sur des courses de 600 μm. Par conséquent, la solution développée est dix fois plus rapide que l’existant pour des courses dix fois plus grandes.
Ce robot pourra servir à assembler des systèmes micro-électro-mécaniques et optiques (MEMS/MOEMS) pour l’industrie de l’électronique. Grâce à sa vitesse et à sa compacité, plus de 2000 MiGriBots pourraient être placés dans 1 m2 et réaliser plus d’un million d’opérations par seconde ! Augmenter les cadences permet d’améliorer la productivité et la compétitivité des industriels ce qui favorisera la relocalisation de la production en France, dans les domaines de l’industrie horlogère, l’instrumentation médicale, l’aérospatial, par exemple.
Vous pouvez découvrir MiGriBot en action via cette vidéo.
2ème prix de thèse du GDR robotique
Le 2ème prix a été décerné à Isabelle Maroger pour sa thèse intitulée : Transport de charge homme-robot.
Cette thèse a été réalisée au LAAS-CNRS.
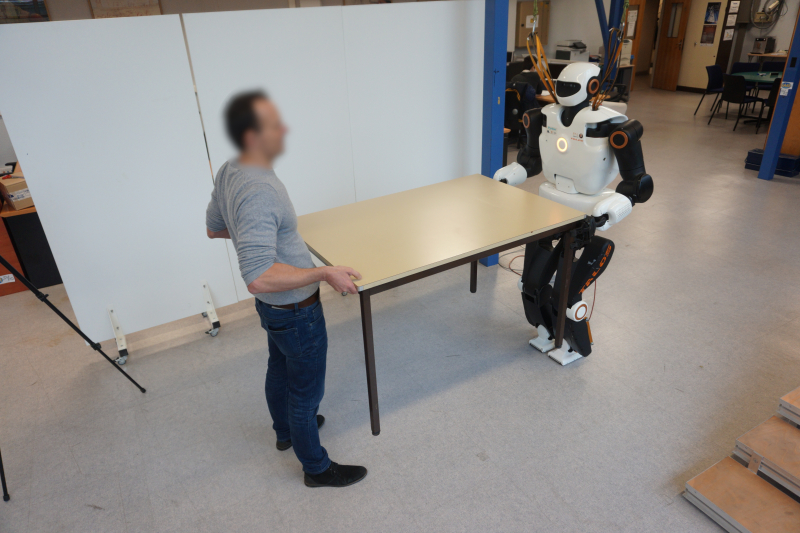
Le but de la thèse d’Isabelle Maroger était de réaliser un transport de table en collaboration entre un humain et un robot humanoïde de type TALOS. Les travaux se sont orientés autour de deux grands axes : un axe biomécanique et un axe robotique. En effet, pour qu'un robot aide au mieux l’humain, la doctorante jugeait nécessaire de contrôler et planifier les actions du robot en fonction du comportement de son partenaire humain et, donc, d’étudier ce dernier. C’est pourquoi une partie de la thèse fût dédiée à comprendre et modéliser les trajectoires de marche humaine lors d’un transport de table, afin que le robot puisse anticiper le comportement de son partenaire lors de cette interaction humain-robot.
Dans ce cadre, Isabelle Maroger a œuvré au développement d’un modèle de prédiction des trajectoires des centres de masse de deux sujets humains transportant une table. L’autre partie fût consacrée à la planification des pas du robot en temps réel et à son contrôle, pour qu’il puisse porter la table avec un humain (soulever la table et marcher avec).