Trois chercheurs du LS2N parmi les trente plus cités depuis 1990 dans la revue « Mechanism and Machine Theory »
Les mécanismes des robots sont étudiés de très près à Nantes depuis plus de 30 ans. De la théorie aux applications industrielles, une véritable « école nantaise » s’est progressivement mise en place autour de Stéphane Caro, Damien Chablat et Philippe Wenger, tous trois directeurs de recherche CNRS au Laboratoire des Sciences du Numérique de Nantes (LS2N - CNRS/École Centrale de Nantes/Nantes Université). Ils font aujourd’hui partie des 30 auteurs les plus cités depuis 1990 dans la prestigieuse revue scientifique Mechanism and Machine Theory.
Tout commence en 1990 lorsque Philippe Wenger, un an avant son recrutement au CNRS, met en évidence une propriété de certains mécanismes de robots qui remet en cause une théorie en place depuis plus de 20 ans. Cette propriété joue un rôle fondamental pour la planification de trajectoires de robots. C'est le lancement d'un axe de recherche sur les robots dits « cuspidaux », robots capables de changer de configuration sans passer par des singularités (configurations où certains déplacements du robot ne peuvent plus être contrôlés), avec la mise en place de formalismes nouveaux permettant de les analyser.
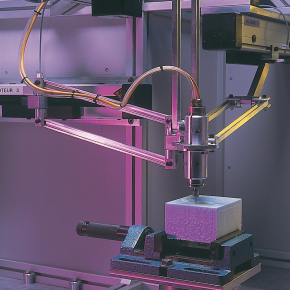
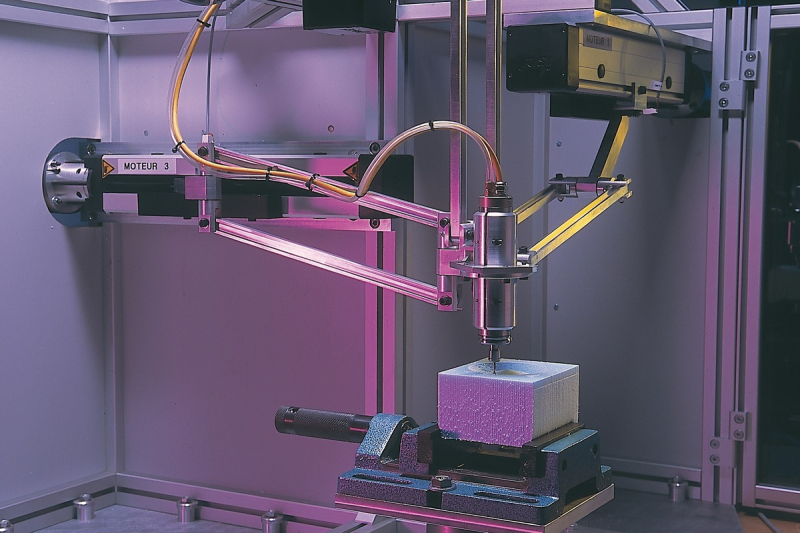
En 1996, Philippe Wenger décide de poser un sujet de thèse sur les mécanismes dits « parallèles » : mécanisme dont la plateforme mobile est reliée à la base par une ou plusieurs chaînes cinématiques fermées à l'image de la plateforme de Gough-Stewart. Cette dernière est utilisée pour la réalisation de nombreux simulateurs de vol. C’est avec Damien Chablat, alors doctorant au LS2N, qu’il travaille sur ce sujet. Les mécanismes parallèles ont de nombreux avantages pour certaines applications comme l'usinage à grande vitesse, mais sont reconnus pour leur grande complexité. Damien Chablat, dans sa thèse qu'il soutient en 1998, généralise à ces mécanismes les résultats obtenus sur les robots cuspidaux. Après un séjour postdoctoral à l’Université McGill de Montréal, il est recruté comme chargé de recherche CNRS à Nantes en 1999. Ses premiers travaux, en collaboration avec Philippe Wenger, conduisent à la réalisation d'un prototype d’un nouveau robot parallèle nommé Orthoglide, robot conçu pour l'usinage à grande vitesse. Son architecture cinématique parallèle isotrope le rend plus rapide que les machines-outils classiques tout en conservant des propriétés géométriques et cinématiques proches de ces dernières.
Stéphane Caro, quant à lui, soutient sa thèse de doctorat en 2004. Ses travaux de thèse ont porté sur la conception robuste de systèmes poly-articulés ainsi que sur l’analyse de leur sensibilité aux erreurs géométriques dans le but de mieux maîtriser leurs performances et d’améliorer leur précision. Il travaille ensuite pendant deux ans dans l’équipe de Jorge Angeles, professeur à l’Université McGill, au Canada, sur la conception d’un nouveau robot parallèle dédié à des opérations rapides et précises de prise et de dépose d’objets avant d’être recruté en tant que chargé de recherche CNRS à Nantes en 2006. Il s'attaque alors, aux côtés de Philippe Wenger, à l’analyse des singularités cinématiques et à la conception de robots parallèles dits « reconfigurables ».
Cette arrivée marque la constitution d’un noyau dur autour de la conception optimale de mécanismes, qui n’a cessé de monter en puissance avec, entre autres, la modélisation poussée de la raideur des robots. Plusieurs collaborations internationales avec le Canada, l'Autriche, le Danemark, la Biélorussie ou encore l'Australie et des liens étroits tissés avec des mathématiciens renommés de l'Institut de recherche mathématique de Rennes (IRMAR – CNRS/ENS Rennes/Université Rennes 1/Université Rennes 2) et d’Inria en géométrie algébrique, permettent de multiplier la dynamique mise en place par les trois chercheurs.
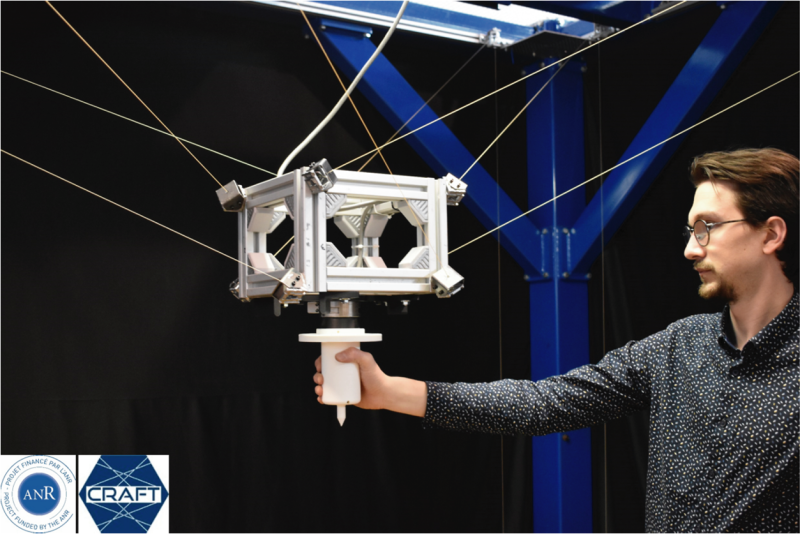
Après avoir travaillé ensemble, Stéphane Caro, Damien Chablat et Philippe Wenger, aujourd’hui tous trois directeurs de recherche CNRS au LS2N, développent chacun leur propre expertise : la robotique parallèle à câbles à des fins industrielles pour Stéphane Caro, la conception de mécanismes parallèles pour le médical pour Damien Chablat et la conception de robots légers inspirés du système musculosquelettique pour Philippe Wenger. Tous trois collaborent activement avec le monde industriel et de façon régulière au travers de l'IRT Jules Verne depuis sa mise en place. Ils ont, à eux trois, encadré 48 doctorants et participé à la formation de plus de 500 étudiants en master international.
Les multiples sollicitations de collaborations internationales par des partenaires chinois et indiens en particulier, leurs brevets ainsi que les citations de leurs articles scientifiques par leurs pairs témoignent de la notoriété acquise par ces trois chercheurs. La revue scientifique Mechanism and Machine Theory les place en effet parmi ses 30 auteurs les plus cités depuis 1990.
Publication
Paulo Flores, A bibliometric overview of Mechanism and Machine Theory journal: Publication trends from 1990 to 2020, Mechanism and Machine Theory, Volume 175, 2022, 104965, ISSN 0094-114X.