
Le vol de l’oiseau-robot
Les ornithoptères (drones qui battent des ailes) sont difficiles à guider en restant sur un chemin prédéfini, car leur dynamique est complexe et leur vitesse peu contrôlable. Pour pallier ce problème, l'équipe de Franck Ruffier, directeur de recherche CNRS à l’Institut des sciences du mouvement - Etienne-Jules Marey (ISM - Aix-Marseille Université/CNRS), dont fait partie Abdoullah Ndoye, doctorant au laboratoire Grenoble Image, Parole, Signal, Automatique (GIPSA-lab - CNRS/Université Grenoble Alpes), a utilisé un champ de vecteurs permettant de ramener systématiquement l’oiseau mécanique sur le « droit chemin ». Leur travaux, publiés lors de la conférence IEEE International Conference on Robotics and Automation (IEEE ICRA), montrent que le fait de tendre et détendre ses ailes permet au robot, appelé MetaFly, de trouver son chemin.
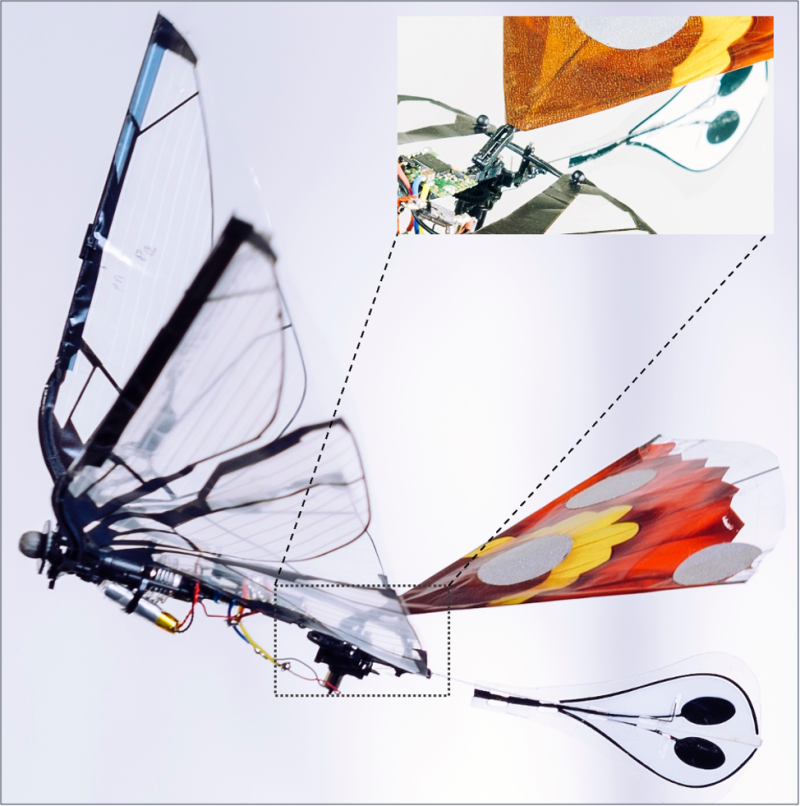
La machine volante est un concept qui fascine bien des générations depuis les croquis de Léonard de Vinci au XVème siècle, jusqu’aux modèles-réduits d’Alphonse Penaud inventeur et théoricien de l’aviation au XIXème siècle. Aujourd’hui, de petits ornithoptères sont commercialisés, tels que l’oiseau MetaFly, conçu par la société marseillaise XTIM-BionicBird. Il pèse seulement 10 grammes et est équipé de deux actionneurs : un à l'avant pour contrôler la fréquence de battements d'ailes comprise entre 10 et 20 Hz et un à l'arrière qui permet de contrôler la direction. Pour se diriger, le robot tend une aile en détendant simultanément son aile opposée et tourne sa gouverne du côté de l'aile détendue. Ces mouvements font “rouler l’oiseau” sur le côté : il vire en virage relevé. Le robot peut ainsi changer son cap et tourner selon le champ de vecteur (image ci-dessous) qui le contrôle pour retrouver son chemin.
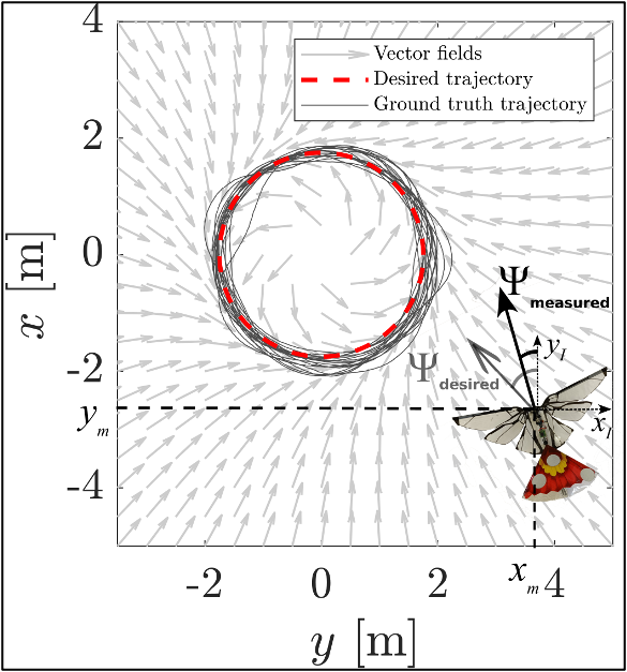
Dans cette étude, le robot est guidé en cap (direction vers laquelle il se dirige) par un champ vectoriel. Cela lui permet de suivre les trajectoires souhaitées avec une grande précision, même si les conditions de départ ne sont pas idéales, dès lors qu'il connaît sa position et son inclinaison. Les chercheurs ont montré que le robot ailé pouvait suivre des cercles de divers diamètres, mais aussi un circuit en huit.
Actuellement, pour mesurer la position et l’inclinaison de Metafly, les chercheurs utilisent des caméras externes. Ils travaillent à utiliser des capteurs embarqués pour effectuer ces mesures, ce qui permettra d'améliorer la performance de l'oiseau mécanique et de le rendre plus autonome.
Cette étude ouvre la voie à de nombreuses applications potentielles, telles que la surveillance environnementale, les missions de recherche et sauvetage, ou encore l'exploration de zones difficilement accessibles.
Vector Field Aided Trajectory Tracking of a 10 gram Flapping Wings Aerial Vehicle
Audiodescription
Publications
Ndoye, A., de Jesus Castillo-Zamora, J., Laki, S. S., Miot, R., van Ruymbeke, E., & Ruffier, F. (2023). Vector Field Aided Trajectory Tracking of a 10-gram Flapping-Wings Aerial Vehicle. 2023 IEEE Int. Conf. Robot. Autom. (ICRA 2023), 29 May – 2 June, 2023, London, UK.