Hussam Atoui : prix de la meilleure thèse 2023 du GDR MACS
Hussam Atoui, doctorant au laboratoire Grenoble Image, Parole, Signal, Automatique (GIPSA-lab - CNRS/Université Grenoble Alpes) en contrôle automatique, est lauréat du prix de la meilleure thèse 2023 remis conjointement par le GDR MACS et la section automatique du Club EEA, avec le soutien de la SAGIP. Ce prix récompense ses travaux de recherche sur la stabilité d'une nouvelle architecture de contrôle de commutation et son application aux véhicules autonomes.
Hussam Atoui a effectué une thèse CIFRE au GIPSA-lab en partenariat avec le groupe Renault entre 2019 et 2022. Il y a proposé et développé des contributions théoriques importantes sur la synthèse de régulateurs linéaires à paramètres variants permettant d’obtenir une famille de régulateurs dont l’interpolation garantit stabilité et performances. Il y a également appliqué cette approche dans le contexte de la commande latérale des véhicules autonomes, allant jusqu’à l’expérimentation sur véhicule réel, en conditions de roulage sur circuit.
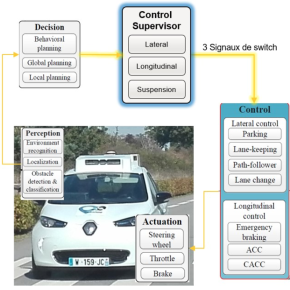
Du point de vue applicatif, une voiture entièrement autonome doit effectuer plusieurs tâches, notamment le contrôle longitudinal, le contrôle latéral, le contrôle du châssis. On sait que la dynamique latérale d'un véhicule autonome varie considérablement en fonction de sa vitesse longitudinale. Plus précisément, à faible vitesse, la dynamique latérale devient plus difficile à contrôler, tandis qu'à grande vitesse, la robustesse et la stabilité du système diminuent. D'autre part, même à des vitesses nominales, le contrôle latéral vise à atteindre divers objectifs tels que le suivi de voie et le changement de voie, l'évitement d'obstacles, les manœuvres d'urgence. Par conséquent, diverses performances sont requises en fonction des différentes situations de circulation auxquelles le véhicule est confronté. Cependant, il est difficile de concevoir un contrôleur unique couvrant toute la plage de vitesse et permettant d'atteindre plusieurs objectifs.
Du point de vue méthodologique, le domaine de la commutation ou de l'architecture de contrôle multimode a été ouvert pour résoudre des tâches variées et obtenir des performances de conduite différentes. Une telle architecture est le résultat d'une combinaison entre plusieurs contrôleurs pour obtenir une performance interpolée. Le principal problème se pose lorsque la transition entre ces algorithmes de contrôle se produit, pouvant entraîner des réactions d'instabilité indésirables. Pour faire face à ces situations difficiles, les travaux se sont concentrés sur un environnement dynamique complexe qui conduit à des structures de contrôle avancées, permettant des transitions multi-contrôleurs.
Cette thèse propose et développe des contributions théoriques importantes sur la synthèse de régulateurs linéaires à paramètres variants (LPV) sous la forme d’une paramétrisation de type youla-kucera (YK), permettant d’obtenir une famille de régulateurs dont l’interpolation garantit stabilité et performances.

La thèse a aussi permis de mettre en œuvre le schéma de contrôle LPV-YK proposé sur les véhicules autonomes, permettant de vérifier plusieurs objectifs de contrôle sur l'ensemble de la plage de vitesse tout en préservant la stabilité du véhicule.
Publication
Hussam Atoui. Switching/Interpolating LPV Control based on Youla-Kucera Parameterization : application to Autonomous Vehicles. Automatic. Université Grenoble Alpes [2020-..], 2022. English. ⟨NNT : 2022GRALT082⟩. ⟨tel-03991730⟩