Développer l’utilisation «intuitive» des outils par les robots
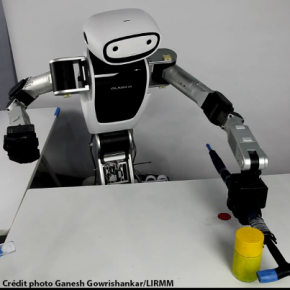
Les humains peuvent reconnaître des objets dans leur environnement et les utiliser comme outils, de façon « intuitive ». Une étude menée par les chercheurs Tee Keng Peng (I2R ASTAR) et Ganesh Gowrishankar du Laboratoire d'Informatique, de Robotique et de Microélectronique de Montpellier (LIRMM - CNRS/Université de Montpellier) dans le cadre du projet Jizai body projet (JST-ERATO), s’intéresse au développement de cette capacité chez les robots, afin de les rendre plus innovants dans des scénarios imprévisibles et non modélisés.
D’après les résultats de cette étude, les robots pourraient, au même titre que les humains, se baser sur l’observation de leurs membres afin d’identifier des outils potentiels.
L'utilisation d'outils a été reconnue comme une compétence importante pour les robots et a fait l'objet de nombreuses recherches. Cependant, l'utilisation des outils a toujours été considérée comme un problème d'apprentissage par les roboticiens et tous les robots précédents qui utilisaient des outils devaient travailler avec au moins certains outils, ou observer l'utilisation des outils par d'autres agents, et apprendre d'eux, afin d'utiliser les outils eux-mêmes.

Ici, l’équipe de recherche s’est basée sur les résultats de leurs précédentes études menées sur l'utilisation d'outils humains (Ganesh et al. Nat. Comm. 2014), embodiment (Aymerich Franch & Ganesh, Neurosci. Res. 2016) et la caractérisation de l'outil humain (Tee et al. ICRA 2018). Celles-ci avaient permis de découvrir que les humains peuvent utiliser leurs propres membres afin d’identifier les objets en tant qu’outils pour diverses tâches. Cela a conduit au développement d'un cadre théorique (framework) qui permet à un robot sans aucune expérience de l'utilisation d'outils, d'identifier des objets en tant qu'outils et de les utiliser sans nécessiter d'apprentissage.
« Notre algorithme permet aux robots de reconnaître et d'utiliser immédiatement des outils dans toutes les tâches qu'ils peuvent effectuer sans outils. Un robot peut identifier les caractéristiques de « fonctionnalité » de ses propres membres qui permettent une tâche, d'utiliser ces caractéristiques pour reconnaître un objet comme un outil potentiel pour la même tâche, puis de développer des mouvements réussis avec l'outil en utilisant des contrôleurs que le robot possède déjà », explicite Ganesh Gowrishankar.
Cognition des outils chez les robots
Audiodescription
Ce cadre fonctionne pour les outils qui permettent des augmentations cinématiques, c’est-à-dire des extensions de la forme et de la taille (qui peuvent être perçues visuellement) de nos membres. Ceux-ci incluent un ensemble important d'outils que nous utilisons dans la vie quotidienne : cuillères, râteaux, pinces, assiettes et même des chaises (pour grimper), etc. Mais il existe d'autres outils qui permettent des augmentations dynamiques/de force, par exemple marteaux et leviers.
De futurs travaux pourraient étendre les résultats de ce travail, afin de permettre à un robot d'utiliser des outils dynamiques, et de s'intégrer aux techniques disponibles d'apprentissage de l'utilisation d'outils. Cette prochaine étape rapprochera les robots de la capacité polyvalente des humains à utiliser des outils.
Expérience sur la cognition des robots
Audiodescription
L'étude a été sélectionnée pour faire la couverture du magazine Nature Machine Intell en juin 2022.
Publication
Tee, K.P., Cheong, S., Li, J. et al. A framework for tool cognition in robots without prior tool learning or observation. Nat Mach Intell 4, 533–543 (2022). https://doi.org/10.1038/s42256-022-00500-9