Des travaux pour des robots plus autonomes et vers une chirurgie plus sûre et précise récompensés par le GDR Robotique
Lors de sa thèse au Département d'informatique de l'École normale supérieure (DI ENS - CNRS/ENS - PSL/Inria), Quentin Le Lidec a travaillé à l’interface entre algorithme, optimisation et apprentissage automatique pour rendre les robots plus autonomes. Lingxiao Xun, quant à lui, s’est concentré sur les implants cochléaires actifs guidés pendant sa thèse au Centre de recherche en informatique, signal et automatique de Lille (CRIStAL - CNRS/Centrale Lille/Université de Lille). Ils sont récipiendaires du prix de thèse du groupement de recherche (GDR) Robotique.
Chaque année, le GDR Robotique décerne son prix de thèse récompensant les contributions des doctorantes et doctorants dans le domaine de la robotique. Cette année, Quentin Le Lidec et Lingxiao Xun ont été récompensés pour leurs thèses soutenues en 2024.
Quentin Le Lidec, des algorithmes pour des robots plus autonomes grâce à l’optimisation et l’apprentissage automatique
Dans sa thèse encadrée par Justin Carpentier, chargé de recherche Inria au DI ENS, Ivan Laptev, professeur au Mohamed bin Zayed University of Artificial Intelligence (Abu Dhabi) et Cordelia Schmid, directrice de recherche Inria et membre de Google et Inria Willow, Quentin Le Lidec aborde un enjeu central de la robotique moderne : doter les robots d’une autonomie et d’une adaptabilité accrues dans des environnements complexes. Jusqu’ici, les modèles de simulation et de contrôle, souvent simplifiés, limitaient leur interaction avec le monde réel.
Pour y remédier, Quentin Le Lidec a exploité les avancées récentes en robotique différentiable, une approche qui combine optimisation mathématique et apprentissage automatique. Il a ainsi développé des outils open source dédiés à la simulation différentiable, s’inscrivant dans la lignée des bibliothèques comme PyTorch ou JAX. Ces outils exploitent les gradients automatiques pour modéliser finement la physique des robots, permettant ainsi de calculer en temps réel les ajustements nécessaires à leurs mouvements — qu’il s’agisse de se déplacer sur un terrain irrégulier ou de manipuler des objets avec précision. Ses travaux posent les bases de contrôleurs robotiques plus robustes, capables de s’adapter dynamiquement à des environnements variés, et réutilisables par les scientifiques grâce à leur implémentation open source.
Aujourd’hui, Quentin Le Lidec est postdoctorant au Courant Institute School of Mathematics, Computing, and Data Science (États-Unis).
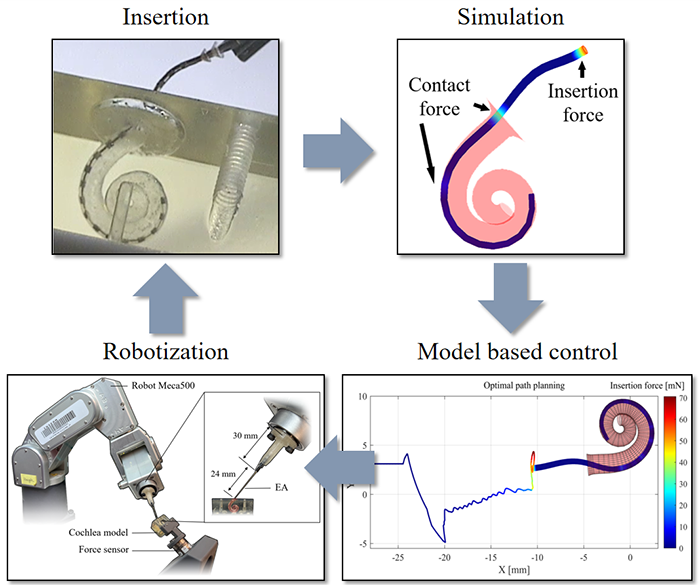
Lingxiao Xun, un implant cochléaire actif guidé par modèle : vers une chirurgie plus sûre et plus précise
Sous la direction d'Alexandre Kruszewsk, professeur à Centrale Lille et Gang Zheng, directeur de recherche Inria, tous deux membres du Centre de recherche en informatique, signal et automatique de Lille (CRIStAL - CNRS/Centrale Lille/Université de Lille), Lingxiao Xun développe un modèle mécanique et un système de contrôle permettant de guider l’insertion d’implants cochléaires actifs. Cette technologie robotique souple vise à réduire les risques chirurgicaux et à améliorer l’audition des patients atteints de surdité profonde.
Pour les personnes souffrant de surdité sévère, l’implant cochléaire peut redonner la compréhension de la parole. Mais l’insertion manuelle de l’électrode dans la cochlée, un organe spiralé de quelques millimètres seulement, reste une opération délicate. La paroi interne est fragile, et la trajectoire de l’implant ne peut pas être directement observée, exposant à des risques de lésion.
Le projet Robocop explore une nouvelle approche : rendre l’implant lui-même actif, capable de se courber lors de l’insertion grâce à des polymères électro-stimulables. Dans ce contexte, Lingxiao Xun apporte trois contributions majeures :
- Un modèle mécanique de l’implant basé sur la théorie des tiges de Cosserat, plus léger et plus rapide que les modèles éléments finis traditionnels, tout en restant précis. Ce modèle permet de simuler en temps réel la déformation de l’implant et ses interactions avec les parois cochléaires.
- Une méthode pour identifier automatiquement ses paramètres physiques à partir de mesures visuelles.
- Un système de contrôle optimal permettant de guider l’insertion en tenant compte des contacts et des frottements.
Ces travaux ouvrent la voie à des implants cochléaires robotisés plus sûrs et à une standardisation de la chirurgie. Aujourd’hui, Lingxiao Xun poursuit ses recherches en tant que postdoctorant Sorbonne Université à l’Institut des systèmes intelligents et de robotique (ISIR - CNRS/Sorbonne Université).