Automatique : un nouvel outil pour étudier la saturation des actionneurs
Les actionneurs d’un système dynamique, comme les ailerons d’un avion ou les vannes d’un appareil hydraulique, se retrouvent parfois poussés jusqu’à leur amplitude maximale. Cette saturation doit être bien comprise afin d’éviter qu’elle ne perturbe, voire n’endommage, l’ensemble du mécanisme. Pour cela, des chercheurs du Laboratoire d’analyse et d’architecture des systèmes (LAAS-CNRS) et du Laboratoire des Signaux et Systèmes (L2S - CNRS/CentraleSupélec/Université Paris-Saclay) ont développé une approche mathématique qui permet de mieux caractériser le domaine sûr de fonctionnement d’un système dont les actionneurs sont saturés.
Les machines et autres systèmes dynamiques accomplissent d’innombrables tâches, grâce notamment à leurs actionneurs : la partie d’un appareil qui effectue physiquement et concrètement le travail. Un actionneur peut pour cela se déplacer ou changer de forme. L’amplitude d’un actionneur est cependant limitée, comme une valve ouverte au maximum ne peut plus s’agrandir pour laisser passer davantage de liquide. Si l’actionneur est trop souvent ou trop longtemps saturé, le comportement du système risque de se dégrader au point de devenir instable.
On retrouve ce cas de figure dans de nombreux exemples, comme quand un avion déploie des volets sur ses ailes lors de turbulences, mais que l’angle nécessaire pour stabiliser complètement l’appareil n’est pas atteignable car les volets ne peuvent pas s’ouvrir davantage. Ce problème peut être évité en surdimensionnant les actionneurs, ce qui augmente cependant leur coût, ou en limitant les tâches à réaliser pour sous-utiliser les actionneurs, cependant sans garantie formelle de succès. Une approche plus efficace consiste à étudier plus précisément le système, en évaluant son domaine sûr de fonctionnement.
« Quand un actionneur est saturé, l’origine du système, c’est-à-dire le point où toutes les coordonnées valent zéro, n’est plus le seul point d’équilibre, point où l’évolution du système est stationnaire, explique Sophie Tarbouriech, directrice de recherche CNRS au LAAS-CNRS. Pour sortir de la saturation, nous cherchons à éviter tous ces autres points d’équilibre. Or ces points se situent en dehors de ce que l’on appelle le domaine d’attraction. Nous devons donc déterminer ce domaine afin d’initialiser le système dans une zone de fonctionnement sûre. »
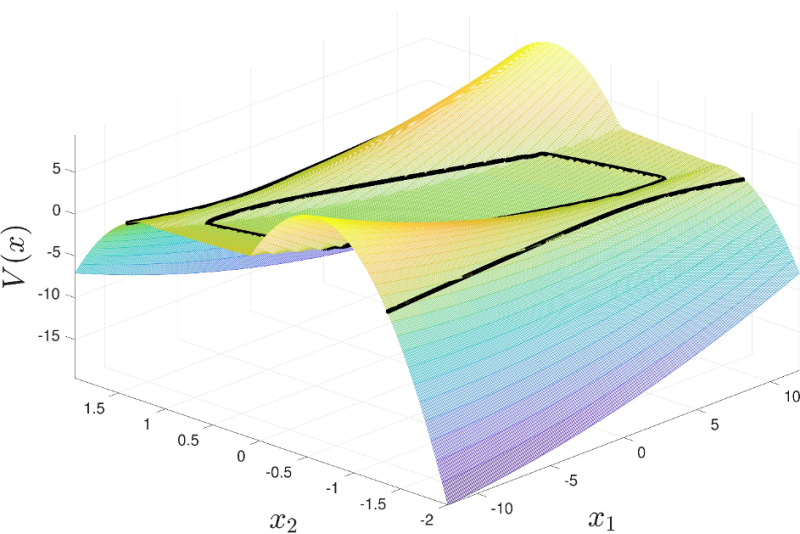
Ce domaine d’attraction est la plus grande région de l’espace d’état depuis laquelle toutes les évolutions possibles, c’est-à-dire les mouvements et les trajectoires, rejoignent le point d’équilibre du système situé en son origine. Le domaine d’attraction est généralement de forme complexe et ne peut donc être qu’estimé.
« Il faudrait simuler toutes les possibilités d’un système dynamique pour pouvoir l’étudier, or il est quasiment impossible de connaître toutes les trajectoires existantes, souligne Sophie Tarbouriech. Nous utilisons à la place un outil qui représente au mieux le système : une fonction de Lyapunov. Le signe et la dérivée de cette fonction nous permettent ensuite de caractériser le domaine d’attraction. »
Les méthodes habituelles passent par des fonctions de Lyapunov quadratiques, une famille à laquelle appartiennent les polynômes du second degré. Avec des collègues du LAAS-CNRS et du L2S, Sophie Tarbouriech a proposé une nouvelle approche dans la revue IEEE Transactions on Automatic Control. Elle est basée sur l’introduction d’une nouvelle classe de fonctions de Lyapunov : les fonctions quadratiques étendues de signe indéfini.
Celles-ci permettent d’obtenir une approximation du domaine d’attraction plus large et plus proche du véritable domaine, tout en n’étant pas forcément convexe. Les performances supérieures de cet outil viennent notamment du fait qu’il s’appuie sur des fonctions de Lyapunov qui peuvent devenir négatives, ce qui n’est pas le cas avec les méthodes classiques. Les fonctions quadratiques étendues de signe indéfini donnent également de meilleurs résultats lorsque les bornes de saturation sont dissymétriques, c’est-à-dire quand l’amplitude de mouvement d’un actionneur n’est pas la même dans toutes les directions.
Si ces travaux revêtent un caractère plutôt fondamental, ils devraient progressivement trouver des applications en ingénierie. Pour aider ce transfert, les chercheurs étudient à présent des solutions compatibles avec des boucles anti-windup, utilisées pour modifier les contrôleurs en réaction à la saturation d’un actionneur.